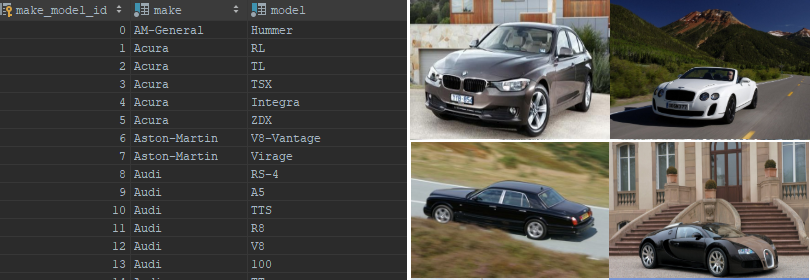
This project aims at recognizing the car make and model based on a Stanford Cars Dataset with 16,185 images. This dataset includes information about car make, model, and year (Eg. 2012 Tesla Model S) with 196 different classes. However, in this project we target to identify the car make and model only; this results in 164 different classes in total.